


起重機(jī)文章
Product Series
推薦產(chǎn)品
 MHZ型單梁抓斗門式起重機(jī)|MHZ型抓斗單梁門式起重機(jī)
MHZ型單梁抓斗門式起重機(jī)|MHZ型抓斗單梁門式起重機(jī) QZ型抓斗雙梁起重機(jī)|QZ型雙梁抓斗起重機(jī)
QZ型抓斗雙梁起重機(jī)|QZ型雙梁抓斗起重機(jī) QD型雙梁起重機(jī)|電動(dòng)雙梁起重機(jī)
QD型雙梁起重機(jī)|電動(dòng)雙梁起重機(jī) 電動(dòng)單梁懸掛起重機(jī)|LX型電動(dòng)單梁懸掛起重機(jī)
電動(dòng)單梁懸掛起重機(jī)|LX型電動(dòng)單梁懸掛起重機(jī) QZ型抓斗橋式起重機(jī)|雙梁抓斗橋式起重機(jī)
QZ型抓斗橋式起重機(jī)|雙梁抓斗橋式起重機(jī) LX型電動(dòng)單梁懸掛起重機(jī)|電動(dòng)單梁懸掛行車吊車
LX型電動(dòng)單梁懸掛起重機(jī)|電動(dòng)單梁懸掛行車吊車 MHE型雙吊鉤門式起重機(jī)|MHE型雙葫蘆門式起重機(jī)
MHE型雙吊鉤門式起重機(jī)|MHE型雙葫蘆門式起重機(jī) LZ型抓斗電動(dòng)單梁起重機(jī)|LZ型電動(dòng)單梁抓斗起重機(jī)
LZ型抓斗電動(dòng)單梁起重機(jī)|LZ型電動(dòng)單梁抓斗起重機(jī) MHB型電動(dòng)葫蘆半門式起重機(jī)單梁半門式起重機(jī)
MHB型電動(dòng)葫蘆半門式起重機(jī)單梁半門式起重機(jī)

河南華東起重機(jī)械設(shè)備公司
服務(wù)熱線:400 086 9590
公司:河南華東起重機(jī)械設(shè)備有限公司
聯(lián)系人:賈經(jīng)理
聯(lián)系電話:13903802779
地址:河南新鄉(xiāng)市封丘縣起重機(jī)工業(yè)園區(qū)
當(dāng)前位置: 起重機(jī) > 起重機(jī)文章
電動(dòng)葫蘆的PLC控制電路與電動(dòng)葫蘆升降PLC控制原理圖詳解
時(shí)間:2024-10-03來源:起重機(jī)廠家瀏覽次數(shù):1
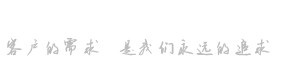
電動(dòng)葫蘆的PLC控制電路如下:
 電動(dòng)葫蘆的PLC控制電路
電動(dòng)葫蘆的PLC控制電路
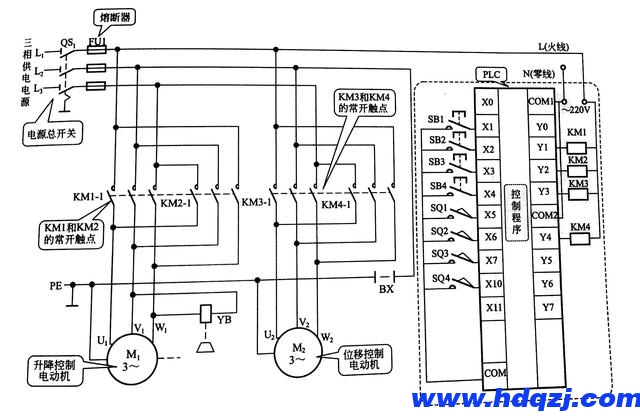
I/O分配表如下:
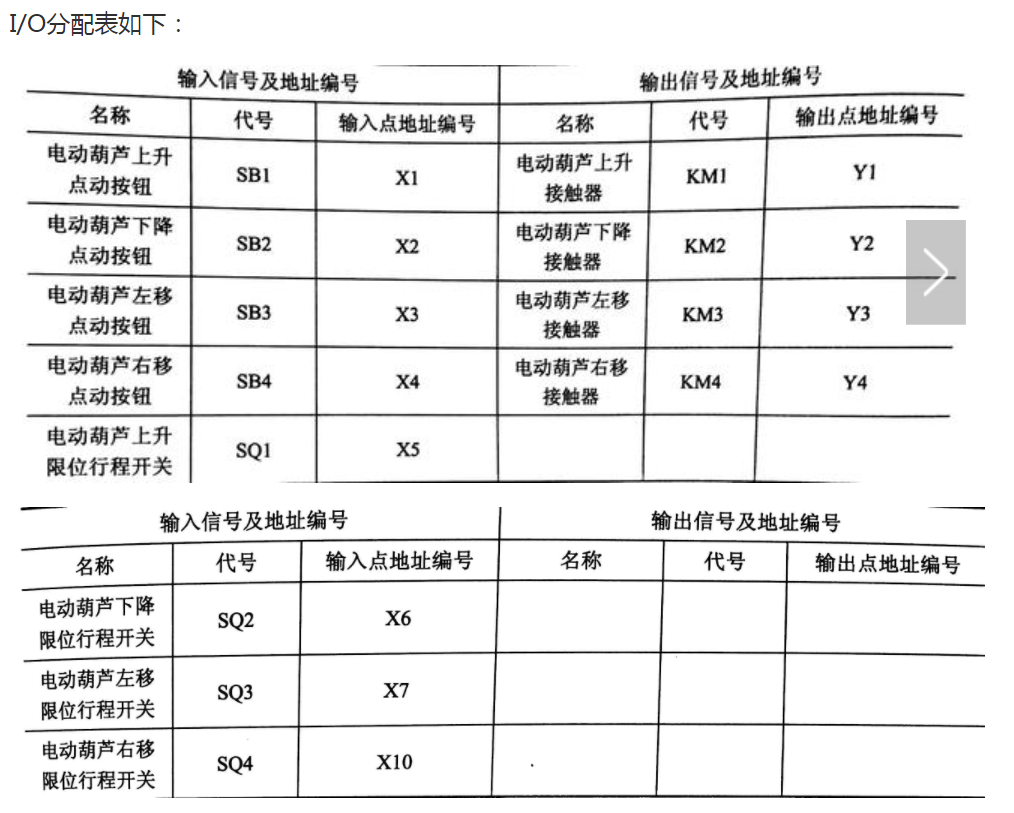 I/O分配表
I/O分配表
梯形圖如下:
 梯形圖
梯形圖
電動(dòng)葫蘆的上升過程為:
當(dāng)按下電動(dòng)葫蘆上升點(diǎn)動(dòng)控制按鈕SB1時(shí)(步驟1),其將PLC內(nèi)的×1置1,即該觸點(diǎn)接通(步驟2),使得Y1得電(步驟3),控制PLC外接交流接觸器線圈KM得電,同時(shí)其常閉觸點(diǎn)×1置0,即該觸點(diǎn)斷開防Y2(KM2)得電,Y1得電,常閉觸點(diǎn)Y1斷開,Y2(KM2)互鎖(步驟4)。主電路中的主觸點(diǎn)KM1-1閉合,接通電動(dòng)機(jī)電源,升降控制電動(dòng)機(jī)啟動(dòng)開始上升運(yùn)轉(zhuǎn)(步驟5)。
當(dāng)電動(dòng)機(jī)上升到限位開關(guān)SQ1設(shè)定位置時(shí),限位行程開關(guān)SQ1動(dòng)作,將PLC內(nèi)×5置0,即觸點(diǎn)斷開,Y1失電,接觸器KM1線圈失電復(fù)位,主觸點(diǎn)復(fù)位斷開,電動(dòng)機(jī)停止上升(步驟6)。
電動(dòng)葫蘆的下降過程為:
當(dāng)按下下降點(diǎn)動(dòng)控制按鈕SB2時(shí)(步驟7),其將PLC內(nèi)的×2置1,即該觸點(diǎn)接通(步驟8),使得Y2得電(步驟9),控制PLC外接交流接觸器線圈KM2得電,同時(shí)其常閉觸點(diǎn)×2置0,即該觸點(diǎn)斷開(步驟8),防止Y1(KM1)得電。Y2得電,常閉觸點(diǎn)Y2斷開與Y1(KM1)互鎖(步驟10),KM2得電,主電路中的主觸點(diǎn)閉合,接通電動(dòng)機(jī)電源,升降控制電動(dòng)機(jī)啟動(dòng)開始下降運(yùn)轉(zhuǎn)(步驟11)。
當(dāng)電動(dòng)機(jī)下降到限位開關(guān)SQ2設(shè)定位置時(shí),限位行程開關(guān)SQ2動(dòng)作,將PLC內(nèi)×6置o,
即該觸點(diǎn)斷開,Y2失電,即接觸器KM2線圈失電復(fù)位,主觸點(diǎn)復(fù)位斷開,電動(dòng)機(jī)停止下降(步驟12)。
以上就是關(guān)于電動(dòng)葫蘆上升下降過程中,電動(dòng)葫蘆PLC控制電動(dòng)路的原理并附圖解說明。







